Bueno, os adelanto ya, que la próxima práctica que haremos con nuestra arduino será con un CNY70, esto es, un sensor receptor de infrarrojos, que nos servirá para seguir una linea negra en un fondo blanco.
miércoles, 27 de febrero de 2013
lunes, 25 de febrero de 2013
Olimpiada Química
Efectivamente, soy un vacín, un golismero, y por tanto me "he" apuntado a las olimpiadas químicas de albacete
Son el 7 de marzo, a ver que tal se dan...... jajajaj
Son el 7 de marzo, a ver que tal se dan...... jajajaj
sábado, 23 de febrero de 2013
Funcionamiento de una resistencia LDR
Os recuerdo que todo lo que estamos haciendo, son pruebas para aplicarlas, posteriormente, a un coche teledirigido, por bluetooth, o ya veremos por qué vía jaja. Vamos a probar una resistencia LDR.
Una resistencia LDR es una resistencia que varía su valor dependiendo de la luz que incida sobre ella.
Una resistencia LDR es una resistencia que varía su valor dependiendo de la luz que incida sobre ella.
viernes, 15 de febrero de 2013
¿Qué es un puente H?
Bueno amigos, estamos hablando mucho en la sección electrónica de andar por casa de un llamado puente H, pero, ¿qué es un puente H?
miércoles, 13 de febrero de 2013
Puente H y SRF-05 en robot
Bueno, el proyecto va tomando su forma, y en esta etapa de "probaturas" tenemos ya, usando el puente H con nuestro circuito integrado L293B y el sensor de ultrasonidos SRF-05, un robot capaz de detectar obstáculos por delante suyo, y, en este caso, retroceder hacia atrás un segundo, y girar hacia la izquierda.
lunes, 11 de febrero de 2013
Cómo rootear nuestro GT-S5839i
Buenos amigos, hoy vamos a explicar (es un procedimiento muy sencillo) como rootear nuestro Samsung Galaxy Ace 5830i/9i
En primer lugar debemos descargarnos el siguiente archivo y guardarlo en la memoria sd, en la raíz de nuestra tarjeta
https://dl.dropbox.com/u/35240381/AceGingerRoot.zip
Ahora hemos de apagar el teléfono.
Despues de apagarse, encendemos el teléfono con las teclas POWER, HOME y VOLUMEN + presionadas, así entraremos en modo recovery en nuestro Ace.
Una vez en modo recovery, desplazándonos con las teclas de volumen, y aceptando con la tecla HOME, seleccionaremos "apply update from sd card" y seleccionaremos nuestro archivo de arriba.
Lo seleccionamos y, una vez se haya instalado, reiniciamos el móvil y listo, ya somos superusuarios! ;)
Espero que os haya servido, y pronto subiré algo sobre cómo liberar el Ace ;)
Un saludo! ;)
En primer lugar debemos descargarnos el siguiente archivo y guardarlo en la memoria sd, en la raíz de nuestra tarjeta
https://dl.dropbox.com/u/35240381/AceGingerRoot.zip
Ahora hemos de apagar el teléfono.
Despues de apagarse, encendemos el teléfono con las teclas POWER, HOME y VOLUMEN + presionadas, así entraremos en modo recovery en nuestro Ace.
Una vez en modo recovery, desplazándonos con las teclas de volumen, y aceptando con la tecla HOME, seleccionaremos "apply update from sd card" y seleccionaremos nuestro archivo de arriba.
Lo seleccionamos y, una vez se haya instalado, reiniciamos el móvil y listo, ya somos superusuarios! ;)
Espero que os haya servido, y pronto subiré algo sobre cómo liberar el Ace ;)
Un saludo! ;)
Cosas del día a día
Bueno, amigos, como estaba claro, nadie trastea con cosas si no sufre daños jaja. En mi caso, pues, trasteando con arduino, un cable se me ha roto dentro de una de las tomas de tierra de arduino (suerte que no ha sido en ningún pin de entrada o de salida, ya que tomas de tierra hay 3 en la propia arduino, más la pila que le pongamos) y además, el otro día, soldando unos cables al CNY70 para probarlo (no pude porque no tenía resistencias) me quemé la mano. Se me escapo el soldador de entre las manos y me queme así en dos dedos un poquito jajaja. Mirad la quemadura, no es nada comparado con otras lesiones que suceden, pero escuece jaja


Se quedó a gusto el puto soldador jajaja. Bueno, vamos a ver si hacemos algo con el bot ;)
Adios a todos!
sábado, 9 de febrero de 2013
Funcionamiento del L293B
Aquí tenemos un vídeo, resultante de mucho rato de pruebas, de cómo funciona nuestro circuito integrado L293B. Ha costado varios intentos, no por la complejidad de conexión, sino por la limitación de espacio de trabajo. Aquí les dejo un vídeo, y, más tarde, les subiré un esquema con el conexionado del mismo. Aquí tienen el vídeo. Un saludo. José Ángel ;)

El conexionado del integrado para que funcione tal y como se muestra en el video es el siguiente. Lo he hecho a mano, porque en el programa tengo el l293d, que es igual que el nuestro, solo que ya incluye los diodos de protección.

Esta noche veremos a ver si conseguimos ya mover el robot con algún sensor.. ;)
Adiós a todos! ;)
Código de la práctica del sensor de proximidad SRF-05
Bueno amigos, la semana pasada subi un video donde probábamos la eficacia de un sensor de proximidad. El sensor de proximidad, para ser precisos, el SRF-05, está pensado para conectarse con un microcontrolador PIC, pero nosotros tenemos una arduino, por lo tanto, tuvimos que adaptar unas cuantas cosas al arduino. El esquema del SRF-05 es así:
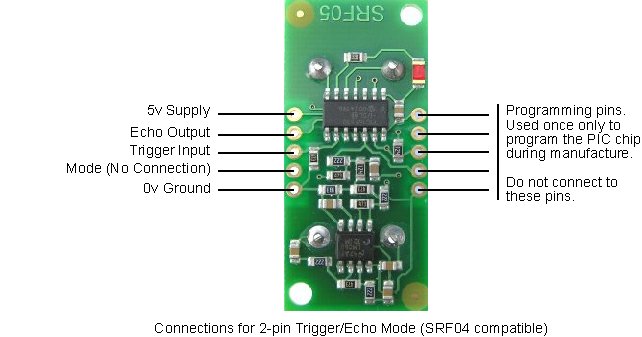
solo se conectan las patillas que se encuentran en este lugar, en el lado izquierdo, pero tenemos que tener cuidado con la posición del sensor.
El código es el siguiente, ya explicado:
//Código que enciende y apaga un led dependiendo de lo cerca que un sensor (SRF-05) detecte un objeto a una cierta distancia. Realizado por José Ángel Salvador//
int led = 13; /* Declaramos la variable entera con el número de pin en que se conectará el led */
int echoPin = 3; /* Este es el pin echo output en la figura del blog de arriba, conectaremos, por tanto el echo output al pin número 3 de nuestra arduino */
int initPin = 2; /* Este es el pin trigger input, por el que introduciremos un pulso de 10 microsegundos al sensor, para que se active y empiece a emitir radio. Conectado al pin 2 */
int minn = 35; /* Aquí indicamos la distancia en centímetros (puesto que el sensor está más o menos calibrado) a la que queremos que el sensor se active */
unsigned long pulseTime = 0; /* Declaramos esta variable como un entero largo sin signo, en el que más tarde guardaremos el valor en microsegundos de lo que tarda el pulso de ultra sonidos en volver al receptor */
void setup() {
pinMode(initPin, OUTPUT); /* Incialicamos pin led, y initPin (activacion del sensor) como salidas, y el de lectura del eco, de entrada */
pinMode(echoPin, INPUT);
pinMode(led, OUTPUT);
Serial.begin(9600); /* Comenzamos el monitor serial, para que se nos muestre en pantalla la distancia a la que está el objeto */
}
void loop() {
digitalWrite(initPin, HIGH); /* Inicializamos el pin de activación con valor lógico alto, y lo mantenemos 10 microsegundos hasta desactivarlo */
delayMicroseconds(10);
digitalWrite(initPin, LOW);
pulseTime = pulseIn(echoPin, HIGH); /* Definimos la variable pulseTime como el valor en microsegundos de lo que tarda el sensor en recibir el haz de ultrasonidos */
int distancia = pulseTime/61; /* Esta variable es únicamente para calibrar */
Serial.println(distancia, DEC); /* Imprime en pantalla la distancia en centímetros a la que se encuentra el objeto */
if (distancia < minn) { /* Declaramos la condición para que se encienda el led, en este caso, que la distancia hasta el objeto sea menor que la distancia indicada */
digitalWrite(led, HIGH);
}
else {
digitalWrite(led, LOW);
}
}
// Si podemos cambiar la distancia cambiando el valor de la variable minn, indicando un numero en centímetros. La calibración que le hice es altamente precisa entre 4-35 centímetros. //
// Un saludo a todos. Hasta luego. //
Si este código lo copiáis, y lo pegáis en el compilador de arduino, funcionará perfectamente. En caso contrario, dejad un comentario y os solucionaré la duda ;)
Hasta luego!
solo se conectan las patillas que se encuentran en este lugar, en el lado izquierdo, pero tenemos que tener cuidado con la posición del sensor.
El código es el siguiente, ya explicado:
//Código que enciende y apaga un led dependiendo de lo cerca que un sensor (SRF-05) detecte un objeto a una cierta distancia. Realizado por José Ángel Salvador//
int led = 13; /* Declaramos la variable entera con el número de pin en que se conectará el led */
int echoPin = 3; /* Este es el pin echo output en la figura del blog de arriba, conectaremos, por tanto el echo output al pin número 3 de nuestra arduino */
int initPin = 2; /* Este es el pin trigger input, por el que introduciremos un pulso de 10 microsegundos al sensor, para que se active y empiece a emitir radio. Conectado al pin 2 */
int minn = 35; /* Aquí indicamos la distancia en centímetros (puesto que el sensor está más o menos calibrado) a la que queremos que el sensor se active */
unsigned long pulseTime = 0; /* Declaramos esta variable como un entero largo sin signo, en el que más tarde guardaremos el valor en microsegundos de lo que tarda el pulso de ultra sonidos en volver al receptor */
void setup() {
pinMode(initPin, OUTPUT); /* Incialicamos pin led, y initPin (activacion del sensor) como salidas, y el de lectura del eco, de entrada */
pinMode(echoPin, INPUT);
pinMode(led, OUTPUT);
Serial.begin(9600); /* Comenzamos el monitor serial, para que se nos muestre en pantalla la distancia a la que está el objeto */
}
void loop() {
digitalWrite(initPin, HIGH); /* Inicializamos el pin de activación con valor lógico alto, y lo mantenemos 10 microsegundos hasta desactivarlo */
delayMicroseconds(10);
digitalWrite(initPin, LOW);
pulseTime = pulseIn(echoPin, HIGH); /* Definimos la variable pulseTime como el valor en microsegundos de lo que tarda el sensor en recibir el haz de ultrasonidos */
int distancia = pulseTime/61; /* Esta variable es únicamente para calibrar */
Serial.println(distancia, DEC); /* Imprime en pantalla la distancia en centímetros a la que se encuentra el objeto */
if (distancia < minn) { /* Declaramos la condición para que se encienda el led, en este caso, que la distancia hasta el objeto sea menor que la distancia indicada */
digitalWrite(led, HIGH);
}
else {
digitalWrite(led, LOW);
}
}
// Si podemos cambiar la distancia cambiando el valor de la variable minn, indicando un numero en centímetros. La calibración que le hice es altamente precisa entre 4-35 centímetros. //
// Un saludo a todos. Hasta luego. //
Si este código lo copiáis, y lo pegáis en el compilador de arduino, funcionará perfectamente. En caso contrario, dejad un comentario y os solucionaré la duda ;)
Hasta luego!
Volvemos a las prácticas, con más material
bueno amigos, ahora estamos probando el funcionamiento de un driver de motores L293B, un integrado de 16 patillas, en el que probaremos el cambio de giro de nuestros servos trucados de la base de nuestro motor. Esta tarde, cuando esté todo probado y en funcionamiento subiré videos e imágenes, y subiré los códigos de los programas que os enseñé el otro día. Un saludo!
miércoles, 6 de febrero de 2013
Resultado examen!
¿Os acordáis de aquel día que no subí ninguna entrada porque tenía un examen al día siguiete? Pues bien, ya tengo la nota.. He sacado un 9,1 en ese examen jeje ;). Gracias a todos! ;)
Primeras tomas de contacto con la arduino
Bueno amigos, aquí tenemos dos videos de las primeras tomas de contacto con la placa arduino. El primer video es un poco así de repaso, únicamente para acordarme de cómo iba todo. Es una simple secuencia de leds. aquí tenéis
Como veis, es muy sencillo, y se oye como me llaman a comer, pero eso es otra movida jajaja.
El segundo de los vídeos es una práctica con un sensor de ultrasonidos que detecta proximidad. Este sensor emite un haz de ultrasonidos, y lo recibe, registrándose en una variable el tiempo en microsegundos que tarda el haz en regresar al arduino.
Bueno, casi con certeza, este fin de semana tendréis más cositas para ver. Espero os vaya gustando este blog que va cogiendo ya algo de forma ;)
Un saludo!
Como veis, es muy sencillo, y se oye como me llaman a comer, pero eso es otra movida jajaja.
El segundo de los vídeos es una práctica con un sensor de ultrasonidos que detecta proximidad. Este sensor emite un haz de ultrasonidos, y lo recibe, registrándose en una variable el tiempo en microsegundos que tarda el haz en regresar al arduino.
Bueno, casi con certeza, este fin de semana tendréis más cositas para ver. Espero os vaya gustando este blog que va cogiendo ya algo de forma ;)
Un saludo!
sábado, 2 de febrero de 2013
Ya tenemos el material!
Buenas amigos, os dije que os iba a avisar cuando el material para empezar con nuestros trasteos estuviese listo, y lo está :)
Hay una novedad. Nos han traido una base de un robot, el clasico con dos servos trucados atrás y una rueda loca delante, así que haremos todas las probaturas en éste.
Bueno, os voy a explicar y enseñar todo lo que tengo:

Aquí tenemos el cerebro de la operación, la placa Arduino Uno smd edition, con un chip atmega328, con la que haremos lo que queramos con nuestro robot.

Esta es la base de robot que me han traído, con dos servos y una rueda loca. La estructura aunque parezca que no, es muy resitente.

Aquí tenemos unos cuantos diodos 1N4007, que nos serán útiles a la hora de llevar el diseño a nuestro juguete teledirigido, para conectarlos con el motor y la bobina de la dirección, ya que, al ser inductivos, puede haber riesgo de retroalimentación a través del mismo hilo, por lo que, si esa retroalimentación existe, haremos que escape a través del diodo.

Aquí tenemos unos cuantos LED.

Esto son unos finales de carrera, que usaremos para que el coche tuerza cuando choque con algo

Una placa protoboard para establecer las conexiones de prueba

Esto amigos es un sensor-receptor de ultrasonidos. Lo usaremos para medir cercanía, y en un principio, para que el coche no caiga de una mesa, o algo por el estilo ;)

Finalmente, aquí tenemos unos CNY70, sensores-receptores de infrarrojos, que nos serán muy útiles a la hora de decirle a nuestro robot que siga una línea.
También me han traído un soldador de estaño, un polímetro, un portapilas con sus respectivas pilas, estaño y unos alicates de corte.
Ya he empezado a rememorar el lenguaje de programación de la arduino, haciendo secuencias de leds y esas tonterías tan simplonas. Seguramente esta noche tenga algo preparado para enseñaros ;)
Un saludo y hasta pronto!
Hay una novedad. Nos han traido una base de un robot, el clasico con dos servos trucados atrás y una rueda loca delante, así que haremos todas las probaturas en éste.
Bueno, os voy a explicar y enseñar todo lo que tengo:

Aquí tenemos el cerebro de la operación, la placa Arduino Uno smd edition, con un chip atmega328, con la que haremos lo que queramos con nuestro robot.

Esta es la base de robot que me han traído, con dos servos y una rueda loca. La estructura aunque parezca que no, es muy resitente.

Aquí tenemos unos cuantos diodos 1N4007, que nos serán útiles a la hora de llevar el diseño a nuestro juguete teledirigido, para conectarlos con el motor y la bobina de la dirección, ya que, al ser inductivos, puede haber riesgo de retroalimentación a través del mismo hilo, por lo que, si esa retroalimentación existe, haremos que escape a través del diodo.

Aquí tenemos unos cuantos LED.

Esto son unos finales de carrera, que usaremos para que el coche tuerza cuando choque con algo

Una placa protoboard para establecer las conexiones de prueba

Esto amigos es un sensor-receptor de ultrasonidos. Lo usaremos para medir cercanía, y en un principio, para que el coche no caiga de una mesa, o algo por el estilo ;)

Finalmente, aquí tenemos unos CNY70, sensores-receptores de infrarrojos, que nos serán muy útiles a la hora de decirle a nuestro robot que siga una línea.
También me han traído un soldador de estaño, un polímetro, un portapilas con sus respectivas pilas, estaño y unos alicates de corte.
Ya he empezado a rememorar el lenguaje de programación de la arduino, haciendo secuencias de leds y esas tonterías tan simplonas. Seguramente esta noche tenga algo preparado para enseñaros ;)
Un saludo y hasta pronto!
Suscribirse a:
Entradas (Atom)