Vamos a enseñar en esta entrada, a crear pequeños scripts (o mini aplicaciones) para hacer cualquier cosa que queramos, que se nos ocurra. Sigue leyendo!
lunes, 2 de diciembre de 2013
miércoles, 18 de septiembre de 2013
martes, 4 de junio de 2013
Segundas olimpiadas informáticas
Buenas a todos amigos! Este pasado viernes 24 asistimos a la fase presencial que se disputó en Ciudad Real. Tuvimos que hacer una serie de pruebas, una de ellas de programación, otra un test de informática general, para clasificarnos para la fase final, que se disputo en forma de concurso televisivo. Para nuestra sorpresa... ¡Nos clasificamos! Nuestra puntuación fue de primeros en las primeras fases, pero los premios se disputaron en la fase final. En esta fase, quedamos segundos, obteniendo así el premio del segundo clasificado, un Google Nexus 4. Un teléfono android del que quiero hablaros.
martes, 28 de mayo de 2013
Próximamente
Tras un periodo que he estado sin publicar nada, subiré en los siguientes días mi última invención, debido a un viaje que tuve que realizar. Se trata de un cargador usb cuya fuente de energía son pilas recargables. Está sólo en prototipo, aunque muy pronto estará bien hecho ;)
Estaos atentos!! ;)
Estaos atentos!! ;)
domingo, 12 de mayo de 2013
domingo, 28 de abril de 2013
Programando un PIC
Buenas amigos, he de deciros, que no solo trabajo en Arduino, en arduino trabajé en el colegio, en tecnología de 4º de la ESO, y me pareció fácil y asequible en cuanto a montaje y me gusta mas en lenguaje tipo C (no es C, pero muy parecido) del Arduino, que el PBASIC del PIC.
Sequía de entradas
Como ya sabéis, estoy haciendo 2º Bachiller en un instituto que tiene tela, y no tengo tiempo para subir entradas ni para nada. A ver si termino ya, y seguimos con nuestro proyecto. Quizá no os lo haya contado, pero, todos los sensores que tenemos, funcionan independientemente de que haya luz, o no (excepto la resistencia LDR).
Por tanto, cuando sepamos qué pasa con los CNY70, que uno de ellos, ya nuevo, no funciona, diseñaremos un robot seguidor de línea, eso lo primero, y, seguidamente, un seguidor de línea en la oscuridad, usando la resistencia LDR. Voy a coger la placa y a ponerme a ver qué narices sucede. Si consigo hacerlo funcionar, y consigo sujetar la placa de tal manera que no roce el suelo, pero que esté muy cerca de él, subiré el robot. Si no, pues esperaremos hasta que todo se vea más suelto. Un saludo a los lectores del blog, y hasta pronto! ;)
Por tanto, cuando sepamos qué pasa con los CNY70, que uno de ellos, ya nuevo, no funciona, diseñaremos un robot seguidor de línea, eso lo primero, y, seguidamente, un seguidor de línea en la oscuridad, usando la resistencia LDR. Voy a coger la placa y a ponerme a ver qué narices sucede. Si consigo hacerlo funcionar, y consigo sujetar la placa de tal manera que no roce el suelo, pero que esté muy cerca de él, subiré el robot. Si no, pues esperaremos hasta que todo se vea más suelto. Un saludo a los lectores del blog, y hasta pronto! ;)
miércoles, 17 de abril de 2013
Spring Return Set 2013 - Dj J.A.Salvador
Amigos, amigas, personas que vean este blog, aquí os dejo, la última sesión que he hecho, que no es todo lo que puedo ofrecer, y no es lo mejor que he hecho, pero bueno, es lo mejor que puedo hacer con 2º de Bachillerato encima...
Aquí la tenéis, escuchadla si queréis ;)
https://soundcloud.com/jose-angel-salvador-avenda-o/spring-return-set-2013-dj-j-a
Aquí la tenéis, escuchadla si queréis ;)
https://soundcloud.com/jose-angel-salvador-avenda-o/spring-return-set-2013-dj-j-a
sábado, 13 de abril de 2013
Nºs primos gemelos y de Sophie Germain en C
Bueno amigos. El año pasado, participamos en una olimpiada informatica. En la fase presencial, nos pidieron realizar este programa, que hice yo, puesto que mis compañeros estaban con el excel que también debíamos de hacer.
Getting Back - Mini Session 2013
Bueno amigos y amigas, tras unos 8 meses de sequía musical, he hecho, con música vieja, puesto que no tengo ni internet ni he tenido tiempo para buscar nueva, una pequeña sesioncilla de unos 36 minutos.
Es una simple toma de contacto, para ir entrando en el tema y volver de lleno con la próxima summer set 2k13.
Aquí os dejo el enlace a la sesión en SoundCloud ;)
Un saludo!
https://soundcloud.com/jose-angel-salvador-avenda-o/gettingback
Es una simple toma de contacto, para ir entrando en el tema y volver de lleno con la próxima summer set 2k13.
Aquí os dejo el enlace a la sesión en SoundCloud ;)
Un saludo!
https://soundcloud.com/jose-angel-salvador-avenda-o/gettingback
miércoles, 10 de abril de 2013
Piramide C
Bueno amigos, os voy a enseñar un programa que hice en lenguaje C, en el instituto junto a un compañero. El programa te realiza una pirámide dependiendo de las filas que introduzcas tu.
viernes, 5 de abril de 2013
El dado electrónico
Bueno amigos, se me había olvidado enseñároslo, pero, hace unos días, en el instituto, hicimos en clase de tecnología, un montaje de un circuito secuencial. Un dado electrónico. Este dado, cuenta números del 1 al 6, a una determinada frecuencia que nosotros indicamos mediante un generador de pulsos lógico, en el que podemos elegir entre 1Hz, 10Hz, 100Hz, ó 1kHz.
miércoles, 3 de abril de 2013
Funcionamiento CNY70
Bueno amigos, por fin vamos a probar cómo funciona el CNY70.
Como dijimos anteriormente, este sensor se basa en la reflexión de una luz infrarroja emitida por un led (emisor), que es reflejada en color blanco, para abrir la base del fototransistor (receptor).
Como dijimos anteriormente, este sensor se basa en la reflexión de una luz infrarroja emitida por un led (emisor), que es reflejada en color blanco, para abrir la base del fototransistor (receptor).
lunes, 1 de abril de 2013
Observación
Según veo en las estadísticas del blog, la inmensa mayoría de las visitas han ido a la entrada del último robot, del gallinita ciega. Bien, me comprometo a aumentar la frecuencia de actualización de esta sección, electrónica de andar por casa, porque veo que es lo que más os gusta a los visitantes. Ahora bien, también me gustaría que preguntáseis cualquier duda, tanto en la entrada del blog, como en los videos de Youtube, os las contestaré encantado ;)
Un saludo, y hasta muy pronto ;)
Un saludo, y hasta muy pronto ;)
domingo, 31 de marzo de 2013
Mi música ;)
Bueno amigos, no os lo había comentado, pero también me dedico a la mezcla de música, soy dj aficionado.
Aquí os dejo un enlace de la última sesión que grabé, quiero grabar otra, pero 2º Bachiller no deja tiempo para nada... :S
Pero haré una en cuanto tenga tiempo, prometido ;)
Aquí tenéis el enlace a la sesión que grabé esta primavera pasada, la de 2012 ;)
Un saludo!
https://soundcloud.com/jose-angel-salvador-avenda-o/spring-house-private-set-dj-j
Aquí os dejo un enlace de la última sesión que grabé, quiero grabar otra, pero 2º Bachiller no deja tiempo para nada... :S
Pero haré una en cuanto tenga tiempo, prometido ;)
Aquí tenéis el enlace a la sesión que grabé esta primavera pasada, la de 2012 ;)
Un saludo!
https://soundcloud.com/jose-angel-salvador-avenda-o/spring-house-private-set-dj-j
viernes, 29 de marzo de 2013
Funcionamiento del Bluetooth
Los sistemas BlueTooth trabajan en un rango de frecuencias comprendido entre 2400 y 2483.5 MHz, el cual está dividido en diversas subbandas. Su tasa teórica es de 1Mbps. Al igual que en IP, los datos se transmiten en pequeños paquetes, y cada uno de ellos incluye una cabecera que, entre otros datos, indica la frecuencia de la banda en la que se enviará el siguiente paquete; de esta forma, los periféricos no transmiten siempre en una única frecuencia, sino que van saltando de una a otra en función del tráfico de la red y de otros factores.
domingo, 24 de marzo de 2013
Robot "Gallinita Ciega"
Bueno amigos, ya tenemos el robot que nos propuso Rubén. Ya hemos solucionado el problema de los motores, añadiendo una pila externa de 9V a los motores únicamente, aunque conforme va avanzando, va perdiendo fuerza, no sé por qué, seguramente por algún conflicto entre ambas pilas, por que me parece que en un punto, las dos pilas llegan a compartir toma de tierra... Intentaremos solucionarlo, pero bueno, en nociones básicas, aquí tenemos el robot que únicamente avanza recto, y recalco lo de recto, porque este no tuerce, cuando la luz está apagada, encendiendo un piloto led rojo que delata su posición, para que sepamos donde se ubica el robot. Cuando la luz se enciende, el robot para en unas milesimas de segundo, y apaga el piloto LED.
jueves, 21 de marzo de 2013
Comprobemos el L293B
Bien amigos, como ya dijimos, vamos a ver si el fallo de nuestro robot anteriormente, fue provocado por un fallo en el chip, o basicamente por un fallo de conexión. Sinceramente, vamos a comprobarlo con la esperanza del que fallo haya sido mío, algún cable mal conectado, por lo que vamos a comprobar tensión de los bornes del motor en el integrado.
lunes, 18 de marzo de 2013
Un jueguecito para entretenerse ;)
Este blog, aparte de información, está pensado para entretener, así que, aquí os pongo un jueguecito multijugador (o individual) bastante adictivo ;)
1 on 1 Soccer
El objetivo es marcar más goles que tu rival. Si quieres jugar contra el ordenador tienes que marcar la casilla de Computer a la hora de elegir equipo. Juego para dos jugadores.
Posibles problemas... :S
Bueno amigos, el otro día estaba montando el robot que nos propuso ruben, el de que se para al encender la luz, pero tuvimos un pequeño problema... Todo funciona de maravilla, hasta que intentamos que el robot vaya para atrás... Una de las ruedas, es decir, una de las salidas del L293B, funciona con la rueda hacia delante, pero no hacia detrás... Podemos probar a ver si existe conexion entre las patillas del motor cuando mandamos señal para atras, o para delante (todo depende de como polaricemos el motor) con un polímetro en modo conexión. Me explico, el polímetro tiene un modo en el que emite un pitido cuando existe continuidad entre dos contactos, es decir, que no hay nada que interviene en el buen funcionamiento de los conductores o, en nuestro caso, semiconductores. Probaré este método a ver si me es efectivo, y aunque no lo sea, es el único que se me ocurre cuando lo único que no funciona es un giro de una rueda... Tendréis noticias cuando haya hecho las pruebas ;)
Un saludo, y recordad el proyecto nikonnesas ;)
elrincondearni.blogspot.com
Un saludo, y recordad el proyecto nikonnesas ;)
elrincondearni.blogspot.com
sábado, 16 de marzo de 2013
Se admiten sugerencias
Cualquiera de los lectores de este blog, si queréis algo, alguna sugerencia, alguna duda, comentad y la intentaré resolver ;)
Resultado olimpiada química
Bueno amigos, hoy, después de hace ya un tiempecito, he decidido subir alguna entradita. Os cuento de paso que me presenté a la olimpiada química y se me dio mejor de lo que me esperaba. Espero haber pasado de fase ;)
sábado, 2 de marzo de 2013
Quiero vuestra opinion!
Bueno amigos, este blog lleva un poco tiempo abierto, y me gustaria que ahora elijais vosotros cual queréis que sea la.próxima práctica que hagamos. Así pues, dejad vuestros comentarios con sugerencias, y elegiremos la que mas nos guste ;)
miércoles, 27 de febrero de 2013
CNY70
Bueno, os adelanto ya, que la próxima práctica que haremos con nuestra arduino será con un CNY70, esto es, un sensor receptor de infrarrojos, que nos servirá para seguir una linea negra en un fondo blanco.
lunes, 25 de febrero de 2013
Olimpiada Química
Efectivamente, soy un vacín, un golismero, y por tanto me "he" apuntado a las olimpiadas químicas de albacete
Son el 7 de marzo, a ver que tal se dan...... jajajaj
Son el 7 de marzo, a ver que tal se dan...... jajajaj
sábado, 23 de febrero de 2013
Funcionamiento de una resistencia LDR
Os recuerdo que todo lo que estamos haciendo, son pruebas para aplicarlas, posteriormente, a un coche teledirigido, por bluetooth, o ya veremos por qué vía jaja. Vamos a probar una resistencia LDR.
Una resistencia LDR es una resistencia que varía su valor dependiendo de la luz que incida sobre ella.
Una resistencia LDR es una resistencia que varía su valor dependiendo de la luz que incida sobre ella.
viernes, 15 de febrero de 2013
¿Qué es un puente H?
Bueno amigos, estamos hablando mucho en la sección electrónica de andar por casa de un llamado puente H, pero, ¿qué es un puente H?
miércoles, 13 de febrero de 2013
Puente H y SRF-05 en robot
Bueno, el proyecto va tomando su forma, y en esta etapa de "probaturas" tenemos ya, usando el puente H con nuestro circuito integrado L293B y el sensor de ultrasonidos SRF-05, un robot capaz de detectar obstáculos por delante suyo, y, en este caso, retroceder hacia atrás un segundo, y girar hacia la izquierda.
lunes, 11 de febrero de 2013
Cómo rootear nuestro GT-S5839i
Buenos amigos, hoy vamos a explicar (es un procedimiento muy sencillo) como rootear nuestro Samsung Galaxy Ace 5830i/9i
En primer lugar debemos descargarnos el siguiente archivo y guardarlo en la memoria sd, en la raíz de nuestra tarjeta
https://dl.dropbox.com/u/35240381/AceGingerRoot.zip
Ahora hemos de apagar el teléfono.
Despues de apagarse, encendemos el teléfono con las teclas POWER, HOME y VOLUMEN + presionadas, así entraremos en modo recovery en nuestro Ace.
Una vez en modo recovery, desplazándonos con las teclas de volumen, y aceptando con la tecla HOME, seleccionaremos "apply update from sd card" y seleccionaremos nuestro archivo de arriba.
Lo seleccionamos y, una vez se haya instalado, reiniciamos el móvil y listo, ya somos superusuarios! ;)
Espero que os haya servido, y pronto subiré algo sobre cómo liberar el Ace ;)
Un saludo! ;)
En primer lugar debemos descargarnos el siguiente archivo y guardarlo en la memoria sd, en la raíz de nuestra tarjeta
https://dl.dropbox.com/u/35240381/AceGingerRoot.zip
Ahora hemos de apagar el teléfono.
Despues de apagarse, encendemos el teléfono con las teclas POWER, HOME y VOLUMEN + presionadas, así entraremos en modo recovery en nuestro Ace.
Una vez en modo recovery, desplazándonos con las teclas de volumen, y aceptando con la tecla HOME, seleccionaremos "apply update from sd card" y seleccionaremos nuestro archivo de arriba.
Lo seleccionamos y, una vez se haya instalado, reiniciamos el móvil y listo, ya somos superusuarios! ;)
Espero que os haya servido, y pronto subiré algo sobre cómo liberar el Ace ;)
Un saludo! ;)
Cosas del día a día
Bueno, amigos, como estaba claro, nadie trastea con cosas si no sufre daños jaja. En mi caso, pues, trasteando con arduino, un cable se me ha roto dentro de una de las tomas de tierra de arduino (suerte que no ha sido en ningún pin de entrada o de salida, ya que tomas de tierra hay 3 en la propia arduino, más la pila que le pongamos) y además, el otro día, soldando unos cables al CNY70 para probarlo (no pude porque no tenía resistencias) me quemé la mano. Se me escapo el soldador de entre las manos y me queme así en dos dedos un poquito jajaja. Mirad la quemadura, no es nada comparado con otras lesiones que suceden, pero escuece jaja


Se quedó a gusto el puto soldador jajaja. Bueno, vamos a ver si hacemos algo con el bot ;)
Adios a todos!
sábado, 9 de febrero de 2013
Funcionamiento del L293B
Aquí tenemos un vídeo, resultante de mucho rato de pruebas, de cómo funciona nuestro circuito integrado L293B. Ha costado varios intentos, no por la complejidad de conexión, sino por la limitación de espacio de trabajo. Aquí les dejo un vídeo, y, más tarde, les subiré un esquema con el conexionado del mismo. Aquí tienen el vídeo. Un saludo. José Ángel ;)

El conexionado del integrado para que funcione tal y como se muestra en el video es el siguiente. Lo he hecho a mano, porque en el programa tengo el l293d, que es igual que el nuestro, solo que ya incluye los diodos de protección.

Esta noche veremos a ver si conseguimos ya mover el robot con algún sensor.. ;)
Adiós a todos! ;)
Código de la práctica del sensor de proximidad SRF-05
Bueno amigos, la semana pasada subi un video donde probábamos la eficacia de un sensor de proximidad. El sensor de proximidad, para ser precisos, el SRF-05, está pensado para conectarse con un microcontrolador PIC, pero nosotros tenemos una arduino, por lo tanto, tuvimos que adaptar unas cuantas cosas al arduino. El esquema del SRF-05 es así:
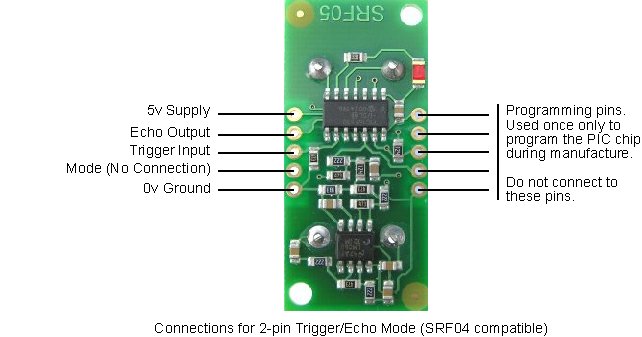
solo se conectan las patillas que se encuentran en este lugar, en el lado izquierdo, pero tenemos que tener cuidado con la posición del sensor.
El código es el siguiente, ya explicado:
//Código que enciende y apaga un led dependiendo de lo cerca que un sensor (SRF-05) detecte un objeto a una cierta distancia. Realizado por José Ángel Salvador//
int led = 13; /* Declaramos la variable entera con el número de pin en que se conectará el led */
int echoPin = 3; /* Este es el pin echo output en la figura del blog de arriba, conectaremos, por tanto el echo output al pin número 3 de nuestra arduino */
int initPin = 2; /* Este es el pin trigger input, por el que introduciremos un pulso de 10 microsegundos al sensor, para que se active y empiece a emitir radio. Conectado al pin 2 */
int minn = 35; /* Aquí indicamos la distancia en centímetros (puesto que el sensor está más o menos calibrado) a la que queremos que el sensor se active */
unsigned long pulseTime = 0; /* Declaramos esta variable como un entero largo sin signo, en el que más tarde guardaremos el valor en microsegundos de lo que tarda el pulso de ultra sonidos en volver al receptor */
void setup() {
pinMode(initPin, OUTPUT); /* Incialicamos pin led, y initPin (activacion del sensor) como salidas, y el de lectura del eco, de entrada */
pinMode(echoPin, INPUT);
pinMode(led, OUTPUT);
Serial.begin(9600); /* Comenzamos el monitor serial, para que se nos muestre en pantalla la distancia a la que está el objeto */
}
void loop() {
digitalWrite(initPin, HIGH); /* Inicializamos el pin de activación con valor lógico alto, y lo mantenemos 10 microsegundos hasta desactivarlo */
delayMicroseconds(10);
digitalWrite(initPin, LOW);
pulseTime = pulseIn(echoPin, HIGH); /* Definimos la variable pulseTime como el valor en microsegundos de lo que tarda el sensor en recibir el haz de ultrasonidos */
int distancia = pulseTime/61; /* Esta variable es únicamente para calibrar */
Serial.println(distancia, DEC); /* Imprime en pantalla la distancia en centímetros a la que se encuentra el objeto */
if (distancia < minn) { /* Declaramos la condición para que se encienda el led, en este caso, que la distancia hasta el objeto sea menor que la distancia indicada */
digitalWrite(led, HIGH);
}
else {
digitalWrite(led, LOW);
}
}
// Si podemos cambiar la distancia cambiando el valor de la variable minn, indicando un numero en centímetros. La calibración que le hice es altamente precisa entre 4-35 centímetros. //
// Un saludo a todos. Hasta luego. //
Si este código lo copiáis, y lo pegáis en el compilador de arduino, funcionará perfectamente. En caso contrario, dejad un comentario y os solucionaré la duda ;)
Hasta luego!
solo se conectan las patillas que se encuentran en este lugar, en el lado izquierdo, pero tenemos que tener cuidado con la posición del sensor.
El código es el siguiente, ya explicado:
//Código que enciende y apaga un led dependiendo de lo cerca que un sensor (SRF-05) detecte un objeto a una cierta distancia. Realizado por José Ángel Salvador//
int led = 13; /* Declaramos la variable entera con el número de pin en que se conectará el led */
int echoPin = 3; /* Este es el pin echo output en la figura del blog de arriba, conectaremos, por tanto el echo output al pin número 3 de nuestra arduino */
int initPin = 2; /* Este es el pin trigger input, por el que introduciremos un pulso de 10 microsegundos al sensor, para que se active y empiece a emitir radio. Conectado al pin 2 */
int minn = 35; /* Aquí indicamos la distancia en centímetros (puesto que el sensor está más o menos calibrado) a la que queremos que el sensor se active */
unsigned long pulseTime = 0; /* Declaramos esta variable como un entero largo sin signo, en el que más tarde guardaremos el valor en microsegundos de lo que tarda el pulso de ultra sonidos en volver al receptor */
void setup() {
pinMode(initPin, OUTPUT); /* Incialicamos pin led, y initPin (activacion del sensor) como salidas, y el de lectura del eco, de entrada */
pinMode(echoPin, INPUT);
pinMode(led, OUTPUT);
Serial.begin(9600); /* Comenzamos el monitor serial, para que se nos muestre en pantalla la distancia a la que está el objeto */
}
void loop() {
digitalWrite(initPin, HIGH); /* Inicializamos el pin de activación con valor lógico alto, y lo mantenemos 10 microsegundos hasta desactivarlo */
delayMicroseconds(10);
digitalWrite(initPin, LOW);
pulseTime = pulseIn(echoPin, HIGH); /* Definimos la variable pulseTime como el valor en microsegundos de lo que tarda el sensor en recibir el haz de ultrasonidos */
int distancia = pulseTime/61; /* Esta variable es únicamente para calibrar */
Serial.println(distancia, DEC); /* Imprime en pantalla la distancia en centímetros a la que se encuentra el objeto */
if (distancia < minn) { /* Declaramos la condición para que se encienda el led, en este caso, que la distancia hasta el objeto sea menor que la distancia indicada */
digitalWrite(led, HIGH);
}
else {
digitalWrite(led, LOW);
}
}
// Si podemos cambiar la distancia cambiando el valor de la variable minn, indicando un numero en centímetros. La calibración que le hice es altamente precisa entre 4-35 centímetros. //
// Un saludo a todos. Hasta luego. //
Si este código lo copiáis, y lo pegáis en el compilador de arduino, funcionará perfectamente. En caso contrario, dejad un comentario y os solucionaré la duda ;)
Hasta luego!
Volvemos a las prácticas, con más material
bueno amigos, ahora estamos probando el funcionamiento de un driver de motores L293B, un integrado de 16 patillas, en el que probaremos el cambio de giro de nuestros servos trucados de la base de nuestro motor. Esta tarde, cuando esté todo probado y en funcionamiento subiré videos e imágenes, y subiré los códigos de los programas que os enseñé el otro día. Un saludo!
miércoles, 6 de febrero de 2013
Resultado examen!
¿Os acordáis de aquel día que no subí ninguna entrada porque tenía un examen al día siguiete? Pues bien, ya tengo la nota.. He sacado un 9,1 en ese examen jeje ;). Gracias a todos! ;)
Primeras tomas de contacto con la arduino
Bueno amigos, aquí tenemos dos videos de las primeras tomas de contacto con la placa arduino. El primer video es un poco así de repaso, únicamente para acordarme de cómo iba todo. Es una simple secuencia de leds. aquí tenéis
Como veis, es muy sencillo, y se oye como me llaman a comer, pero eso es otra movida jajaja.
El segundo de los vídeos es una práctica con un sensor de ultrasonidos que detecta proximidad. Este sensor emite un haz de ultrasonidos, y lo recibe, registrándose en una variable el tiempo en microsegundos que tarda el haz en regresar al arduino.
Bueno, casi con certeza, este fin de semana tendréis más cositas para ver. Espero os vaya gustando este blog que va cogiendo ya algo de forma ;)
Un saludo!
Como veis, es muy sencillo, y se oye como me llaman a comer, pero eso es otra movida jajaja.
El segundo de los vídeos es una práctica con un sensor de ultrasonidos que detecta proximidad. Este sensor emite un haz de ultrasonidos, y lo recibe, registrándose en una variable el tiempo en microsegundos que tarda el haz en regresar al arduino.
Bueno, casi con certeza, este fin de semana tendréis más cositas para ver. Espero os vaya gustando este blog que va cogiendo ya algo de forma ;)
Un saludo!
sábado, 2 de febrero de 2013
Ya tenemos el material!
Buenas amigos, os dije que os iba a avisar cuando el material para empezar con nuestros trasteos estuviese listo, y lo está :)
Hay una novedad. Nos han traido una base de un robot, el clasico con dos servos trucados atrás y una rueda loca delante, así que haremos todas las probaturas en éste.
Bueno, os voy a explicar y enseñar todo lo que tengo:

Aquí tenemos el cerebro de la operación, la placa Arduino Uno smd edition, con un chip atmega328, con la que haremos lo que queramos con nuestro robot.

Esta es la base de robot que me han traído, con dos servos y una rueda loca. La estructura aunque parezca que no, es muy resitente.

Aquí tenemos unos cuantos diodos 1N4007, que nos serán útiles a la hora de llevar el diseño a nuestro juguete teledirigido, para conectarlos con el motor y la bobina de la dirección, ya que, al ser inductivos, puede haber riesgo de retroalimentación a través del mismo hilo, por lo que, si esa retroalimentación existe, haremos que escape a través del diodo.

Aquí tenemos unos cuantos LED.

Esto son unos finales de carrera, que usaremos para que el coche tuerza cuando choque con algo

Una placa protoboard para establecer las conexiones de prueba

Esto amigos es un sensor-receptor de ultrasonidos. Lo usaremos para medir cercanía, y en un principio, para que el coche no caiga de una mesa, o algo por el estilo ;)

Finalmente, aquí tenemos unos CNY70, sensores-receptores de infrarrojos, que nos serán muy útiles a la hora de decirle a nuestro robot que siga una línea.
También me han traído un soldador de estaño, un polímetro, un portapilas con sus respectivas pilas, estaño y unos alicates de corte.
Ya he empezado a rememorar el lenguaje de programación de la arduino, haciendo secuencias de leds y esas tonterías tan simplonas. Seguramente esta noche tenga algo preparado para enseñaros ;)
Un saludo y hasta pronto!
Hay una novedad. Nos han traido una base de un robot, el clasico con dos servos trucados atrás y una rueda loca delante, así que haremos todas las probaturas en éste.
Bueno, os voy a explicar y enseñar todo lo que tengo:

Aquí tenemos el cerebro de la operación, la placa Arduino Uno smd edition, con un chip atmega328, con la que haremos lo que queramos con nuestro robot.

Esta es la base de robot que me han traído, con dos servos y una rueda loca. La estructura aunque parezca que no, es muy resitente.

Aquí tenemos unos cuantos diodos 1N4007, que nos serán útiles a la hora de llevar el diseño a nuestro juguete teledirigido, para conectarlos con el motor y la bobina de la dirección, ya que, al ser inductivos, puede haber riesgo de retroalimentación a través del mismo hilo, por lo que, si esa retroalimentación existe, haremos que escape a través del diodo.

Aquí tenemos unos cuantos LED.

Esto son unos finales de carrera, que usaremos para que el coche tuerza cuando choque con algo

Una placa protoboard para establecer las conexiones de prueba

Esto amigos es un sensor-receptor de ultrasonidos. Lo usaremos para medir cercanía, y en un principio, para que el coche no caiga de una mesa, o algo por el estilo ;)

Finalmente, aquí tenemos unos CNY70, sensores-receptores de infrarrojos, que nos serán muy útiles a la hora de decirle a nuestro robot que siga una línea.
También me han traído un soldador de estaño, un polímetro, un portapilas con sus respectivas pilas, estaño y unos alicates de corte.
Ya he empezado a rememorar el lenguaje de programación de la arduino, haciendo secuencias de leds y esas tonterías tan simplonas. Seguramente esta noche tenga algo preparado para enseñaros ;)
Un saludo y hasta pronto!
jueves, 31 de enero de 2013
Hoy no hay entradas xD
Bueno, mañana tengo el examen del curso. Sí, estoy haciendo 2º de Bachillerato en el IES Andrés de Vandelvira, y mañana tengo examen de Física, en concreto de electrostática y campos magnéticos. Un examen de hora y media con D.Juan Lara.
Así pues, me espera una tarde placentera, en la que seguramente acabe hasta los cojones de imanes y cargas xD.
Hoy no subiré ninguna entrada, porque me pasaré día y noche estudiando para sacar la mayor nota posible... Deseadme suerte! ;)
Así pues, me espera una tarde placentera, en la que seguramente acabe hasta los cojones de imanes y cargas xD.
Hoy no subiré ninguna entrada, porque me pasaré día y noche estudiando para sacar la mayor nota posible... Deseadme suerte! ;)
miércoles, 30 de enero de 2013
Rootear el teléfono
Todos nosotros, cuando recibimos un teléfono android, pasados unos meses, nos ponemos a indagar, y vemos por ahí diversos comentarios sobre algo llamado "rootear" nuestro teléfono. Al principio no tenía ni idea de qué era eso, pero lo rooteé. Lo rootee arriesgándome sin saber qué narices era eso. Al tenerlo rooteado, empecé a indagar por ahí, y descubrí que esto de rootear tenía muchísimas utilidades. Con mi Samsung Galaxy Ace, he podido dar al teléfono permisos de superusuario, es decir, dar permisos totales a todo el teléfono, podiendo modificar así cosas que sin rootear no podríamos. Con el teléfono rooteado he podido decidir qué aplicaciones pasan a ser del sistema y cuáles a la tarjeta sd. Podemos crear una partición en nuestra tarjeta para engañar a nuestro teléfono, haciéndole pensar que ésta es parte de la memoria interna, pudiendo almacenar ahí nuestras apps, y evitar el molesto aviso de "memoria baja". Podemos instalar diversas apps, tales que permiten ver todos nuestros archivos, tanto en la sd, como en la memoria interna (cosa que sin rootear no podíamos) con la app My File Manager. También podemos hacer copia de seguridad de nuestros datos y apps con la app titanium backup, lo que nos será bastante útil a la hora de empezar a trastear con roms (yo tengo una instalada en mi dispositivo, y más tarde explicaré por qué).
En definitiva, si tienes un pepino de móvil, que no necesita ser modificado para ser de lo mejorcito, uno de gama alta, no te arriesgues y no rootees, pero si tienes uno de gama media, media-baja (samsung galaxy ace, galaxy mini, etc.) rootea y sumiérgete en el mundo de las roms. Pronto subiré otra entrada con mi opinión sobre las roms frente a android original. Un saludo y hasta pronto!
@j_angel_trz
En definitiva, si tienes un pepino de móvil, que no necesita ser modificado para ser de lo mejorcito, uno de gama alta, no te arriesgues y no rootees, pero si tienes uno de gama media, media-baja (samsung galaxy ace, galaxy mini, etc.) rootea y sumiérgete en el mundo de las roms. Pronto subiré otra entrada con mi opinión sobre las roms frente a android original. Un saludo y hasta pronto!
@j_angel_trz
martes, 29 de enero de 2013
Manual arduino
Bueno, abrimos otra sección, de electrónica, a secas, no de proyectos, si no de archivos útiles, simulaciones, algun programilla, en fin, otra sección xD
Os dejo aquí un manual sobre arduino, y un pdf con algunas funciones y tal, ahora que estoy con esto del arduino ;)
https://www.dropbox.com/s/8871ryhxs166g39/arduma1.pdf --> Manual de programación en Arduino
https://www.dropbox.com/s/n8emliyxwwyhhg1/Linguaxe_Arduino.pdf --> Algunos comandos de arduino
Espero os sirva de algo ;)
Un saludo!
Os dejo aquí un manual sobre arduino, y un pdf con algunas funciones y tal, ahora que estoy con esto del arduino ;)
https://www.dropbox.com/s/8871ryhxs166g39/arduma1.pdf --> Manual de programación en Arduino
https://www.dropbox.com/s/n8emliyxwwyhhg1/Linguaxe_Arduino.pdf --> Algunos comandos de arduino
Espero os sirva de algo ;)
Un saludo!
Estreno sección
Bueno amigos, estrenamos la sección de Android, en la que pondré aplicaciones curiosas, o útiles, y mis trasteos con mi Samsung Galaxy Ace GT-S5839i
Con el que, adelanto, he instalado una rom que aumenta su rendimiento muy considerablemente, al igual que la duración de la batería ;)
Pronto escribiré por aquí ;)
Un saludo a todos!
@j_angel_trz --> Twitter
Proyecto nikkonnesas
Bueno, la mierda de nombre se debe a que este proyecto no es nada más y nada menos que un trasteo sobre un antiguo coche teledirigido de la marca nikko, el resto del nombre lo ha hecho mi gracia, ya me iréis conociendo.. En fin, he desmontado mi viejo juguete y he descubierto una placa llena de transistores y condensadores, que no consta más que con un integrado, cuyo modelo desconozco, ya que no se ve una mierda porque digo yo que estará quemado o algo xD. En fin, como ahora veréis en las fotos que colocaré, probablemente esta noche, por que ahora me voy a estudiar, lo he desmontado trasteando todo su anterior interior. Estoy a la espera de una placa arduino uno, una pequeña protoboard y algunos "juguetitos", como infrarrojos, sensores de proximidad y finales de carrera. Para que las ruedas traseran giren a la vez (algo que parece una tontería pero que a la hora de montar algo así por el estilo es un verdadero putadon, usaremos un único motor con un eje solidario reductor, es decir, es un eje reductor de las rpm que saca el motorcito eléctrico que funciona a unos 5 V, irá conectado a un eje con las dos ruedas traseras. ¿Cómo se moverá el coche entonces? Pues aprovechando lo existente, manejaremos una dirección con un electroimán, con una bobina y una dirección imantada, que cambiando la polaridad de la bobina, se desplazará hacia un lugar, o hacia otro. Como internet me está puteando, esta noche modificaré esta misma entrada con las fotos del juguete que he desmenuzado, y todos los materiales que necesitaremos. Así pues también subiré todo el procedimiento y los programillas que haga con la futura arduino para que vosotros también podáis hacerlo.
Bien, ya están las fotos, aquí tenemos el teledirigido que vamos a "tunear"






Modificaré la entrada con más pasos cuando tenga los componentes ;)
Un saludo y hasta pronto!
@j_angel_trz --> Twitter
Bien, ya están las fotos, aquí tenemos el teledirigido que vamos a "tunear"

Aquí está la placa, que, como he dicho antes, me he encontrado dentro del coche, que no sé cuál será su funcionamiento, pero intentaremos descubrir

Aquí tenemos el motor, que como hemos dicho antes, consta de una reductora y de un eje solidario, para evitar mal sincronización entre las ruedas traseras

Aquí tenemos lo que más me ha sorprendido del coche, un imán con bobinado, es decir, un electro imán, que gira las ruedas delanteras dependiendo de cómo electrifiquemos la bobina

He aquí el coche totalmente desmenuzado, con la placa ya retirada, a la espera de los componentes que me traerán

Bueno, y montamos y recogemos, ya sin su placa original, a la espera de todo!

Un saludo y hasta pronto!
@j_angel_trz --> Twitter
lunes, 28 de enero de 2013
Apertura del blog
Buenas noches a todos! Este blog queda creado el 28/01/2013 desde Albacete
En este blog podréis ver noticias curiosas que me llamen la atención, tendréis apuntes de diversas materias, siempre que os interesen, claro está. También tendréis aplicaciones útiles para android, así como cosas sobre mí, mis aficiones y mis trasteos con mi Android y electrónica. Tendréis también varios programitas útiles... Es decir, tendréis de todo para vosotros, al igual que mis opiniones, siempre que os interesen. Yo sólo os pido vuestras visitas, nada más ;).
Bueno amig@s, mañana, o incluso esta noche tendréis cositas nuevas ;)
Un saludo amigos!
En este blog podréis ver noticias curiosas que me llamen la atención, tendréis apuntes de diversas materias, siempre que os interesen, claro está. También tendréis aplicaciones útiles para android, así como cosas sobre mí, mis aficiones y mis trasteos con mi Android y electrónica. Tendréis también varios programitas útiles... Es decir, tendréis de todo para vosotros, al igual que mis opiniones, siempre que os interesen. Yo sólo os pido vuestras visitas, nada más ;).
Bueno amig@s, mañana, o incluso esta noche tendréis cositas nuevas ;)
Un saludo amigos!
Suscribirse a:
Entradas (Atom)